|
На данной странице представлена ознакомительная часть выбранного Вами патента
Для получения более подробной информации о патенте (полное описание, формула изобретения и т.д.) Вам необходимо сделать заказ. Нажмите на «Корзину»
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД ИЛИ ДВИГАТЕЛЬ, СПОСОБ ПРИВЕДЕНИЯ ЕГО В ДЕЙСТВИЕ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ |  |
Номер публикации патента: 2179363 |  |
| Редакция МПК: | 7 | | Основные коды МПК: | H02N002/00 H01L041/09 | | Аналоги изобретения: | ЕР 0419778 А1, 03.04.1991. SU 1402207 A1, 30.10.1993. RU 1688754 C, 30.12.1994. EP 0360975, 04.04.1990. JP 0350941 A2, 17.01.1990. |
| Имя заявителя: | ПЬЕЗОМОТОРС УППСАЛА АБ (SE) | | Изобретатели: | БЕКСЕЛЛЬ Матс (SE)
ЮХАНССОН Стефан (SE) | | Патентообладатели: | ПЬЕЗОМОТОРС УППСАЛА АБ (SE) | | Номер конвенционной заявки: | PCT/SE 96/00391 | | Страна приоритета: | WO | | Патентный поверенный: | Поликарпов Александр Викторович |
Реферат | |
Привод или двигатель содержит электромеханический материал, который изменяет свою форму под действием электрического поля, в результате чего создается движение относительно некоторого тела за счет нерезонансного повторения малых шагов. Привод или двигатель включает по меньшей мере один монолитный модуль с электродами, интегрированными в указанный электромеханический материал. Монолитный модуль имеет по меньшей мере одну пассивную часть и по меньшей мере два активных элемента, в каждом из которых имеется по меньшей мере две независимых контактных точки для контакта с указанным телом. Эти контактные точки могут устанавливаться независимо друг от друга путем перемещения по меньшей мере в двух независимых направлениях относительно пассивной части монолитного модуля. Монолитный модуль, один или в сочетании с другими, используется для создания движения относительно тела. Изобретение также касается способа приведения модулей в действие. Способ изготовления привода или двигателя указанного типа включает копирование геометрических профилей в сырой массе электромеханического материала. Изобретение позволяет создать миниатюрные двигатели, содержащие как можно меньше отдельных элементов при сохранении или улучшении точности, которые могут обеспечить широкий диапазон сложных движений. 5 с. и 29 з.п. ф-лы, 9 ил.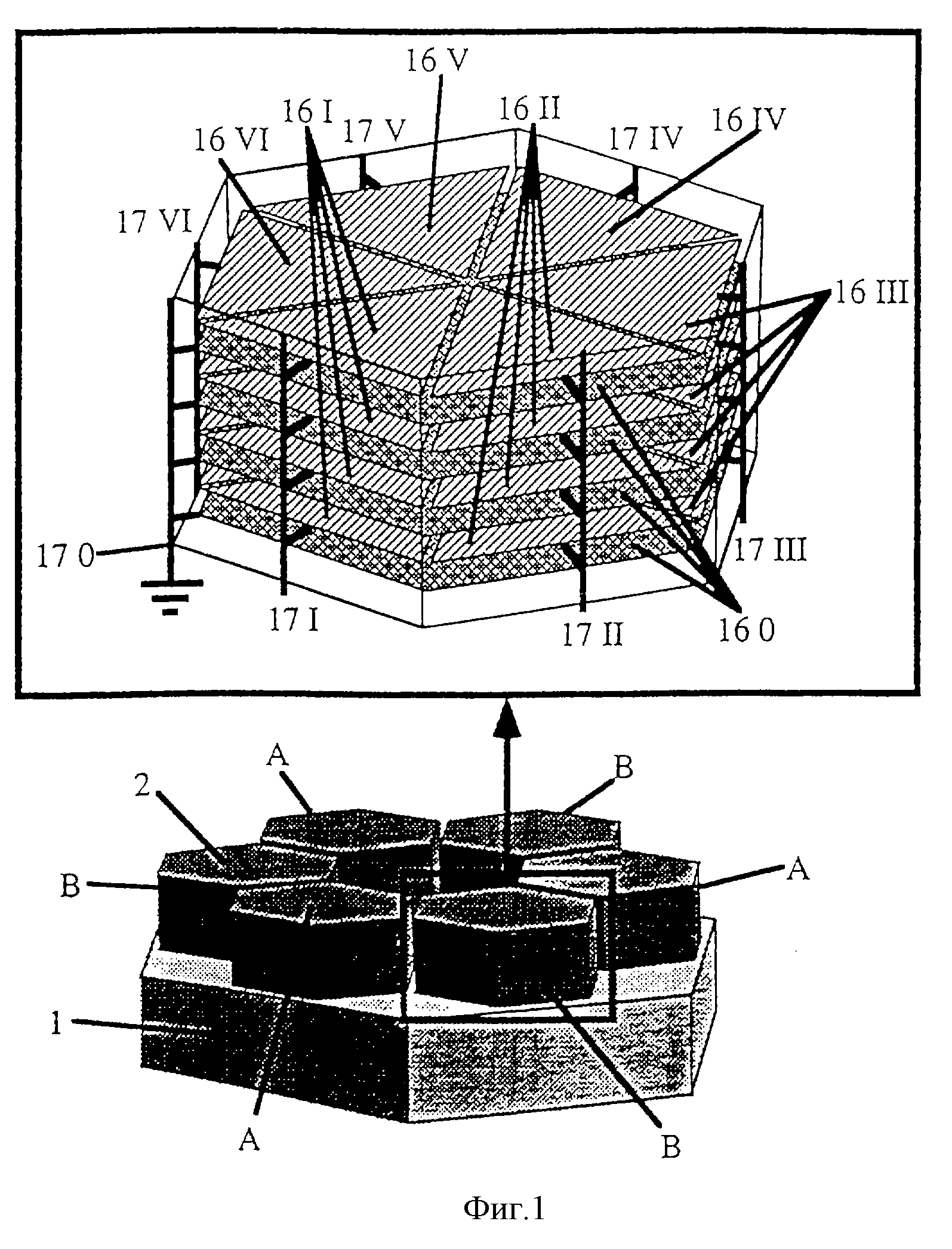
|
 Получить полное описание патента
Получить полное описание патента