|
На данной странице представлена ознакомительная часть выбранного Вами патента
Для получения более подробной информации о патенте (полное описание, формула изобретения и т.д.) Вам необходимо сделать заказ. Нажмите на «Корзину»
| ЭЛЕКТРОДИСТАНЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ |  |
Номер публикации патента: 2174702 |  |
| Редакция МПК: | 7 | | Основные коды МПК: | G05G011/00 | | Аналоги изобретения: | SU 427412 A, 05.05.1974. RU 2018914 C1, 30.08.1994. FR 2748584 A1, 05.05.1997. FR 2762412 A1, 22.04.1997. GB 2012080 A, 08.12.1978. GB 2283582 A, 11.10.1994. GB 2102562 A, 20.05.1982. |
| Имя заявителя: | Акционерное общество открытого типа "ОКБ Сухого" | | Изобретатели: | Шенфинкель Ю.И.
Марбашев К.Х.
Шапиро А.Е.
Лившиц С.А. | | Патентообладатели: | Акционерное общество открытого типа "ОКБ Сухого" |
Реферат | |
Изобретение относится к электродистанционным системам управления. Технический результат заключается в повышении надежности управления. Каждый из двух управляющих органов имеет датчик усилия, прилагаемого его оператором. Каждый из двух электромеханических приводов имеет датчик его положения и выполнен с возможностью выполнения функции интегрирующего звена. Устройство управления электромеханическими приводами содержит сумматор, соединенный с выходами датчиков усилий, и подключено к выходам обоих датчиков положения. Управляемый орган подключен к выходу одного из датчиков положения. Управляющий вход одного из приводов может быть соединен с выходом сумматора сигналов датчиков усилий, а управляющий вход другого привода - с выходом сумматора сигналов датчиков положения. Между выходом сумматора сигналов датчиков усилий и входами двух управляющих сумматоров может быть включен интегрирующий элемент. В каждом из управляющих сумматоров другой вход соединен с выходом датчика положения соответствующего привода, а выход - с управляющим входом этого же привода. Каждый привод может быть снабжен редуктором и соединен с датчиком положения посредством одного из управляющих органов и датчика усилия. 2 с. и 4 з.п.ф-лы, 3 ил.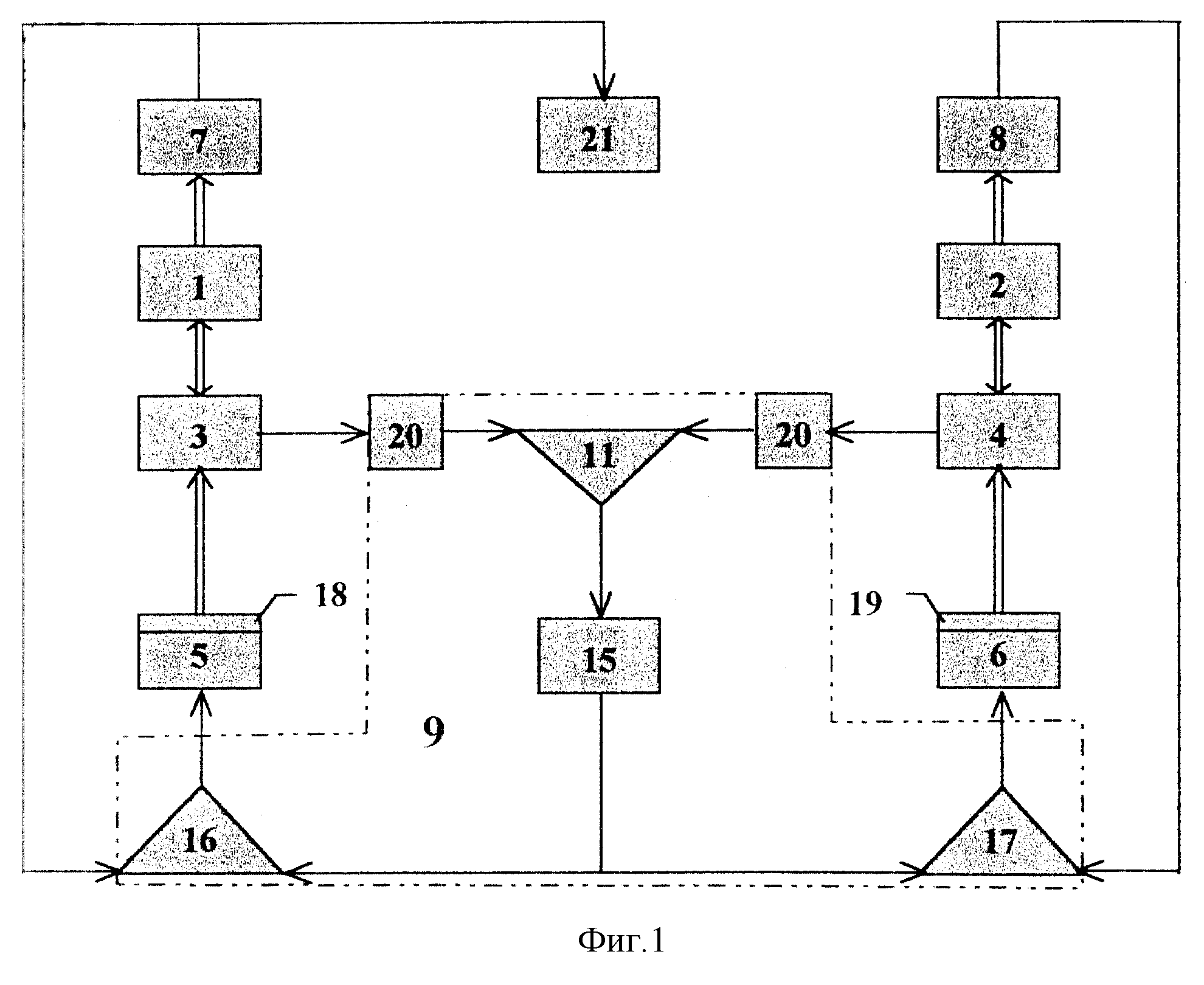
|
 Получить полное описание патента
Получить полное описание патента