|
На данной странице представлена ознакомительная часть выбранного Вами патента
Для получения более подробной информации о патенте (полное описание, формула изобретения и т.д.) Вам необходимо сделать заказ. Нажмите на «Корзину»
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ |  |
Номер публикации патента: 2164362 |  |
| Редакция МПК: | 7 | | Основные коды МПК: | H01L041/09 H02N002/00 B25J007/00 | | Аналоги изобретения: | J.M.Brequet al., A 4-degrees-of-freedan microrobot wit makometer resolution, Robotica, 1996. V.14, p.199-203. SU 864386, 15.09.1981. SU 1823806 A3, 23.03.1989. US 5872417, 16.02.1999. US 4727278, 23.02.1999. |
| Имя заявителя: | Уфимский государственный авиационный технический университет | | Изобретатели: | Ильясов Б.Г.
Даринцев О.В.
Мунасыпов Р.А.
Асеев В.В.
Курбанов Р.М.
Марданов А.З.
Кожевникова О.В.
Пого Е.В. | | Патентообладатели: | Уфимский государственный авиационный технический университет |
Реферат | |
Изобретение относится к машиностроению и может быть использовано в производстве микросистем. Мобильный пьезоэлектрический микроробот содержит подвижную платформу, пьезоэлектрические преобразователи, расположенные в вершинах равностороннего треугольника. Система микроманипулирования содержит шаровую основу, постоянный магнит, пьезоэлектрические преобразователи, образующие декартову систему координат. Привод платформы представляет собой пьезокерамический трубчатый элемент с напыленными одним внутренним и четырьмя внешними симметрично расположенными электродами. Один конец пьезокерамического трубчатого элемента присоединен к втулке с проточенными пазами, в которые уложены провода. К другому свободному концу пьезокерамического трубчатого элемента приклеен рубиновый шарик. Пьезоэлектрические преобразователи системы микроманипулирования выполнены с напыленными одним внутренним и двумя внешними симметрично расположенными электродами и образуют декартову систему координат. Технический результат: повышение производительности микроробота, а также расширение функциональных возможностей узла микроманипулирования. 7 ил.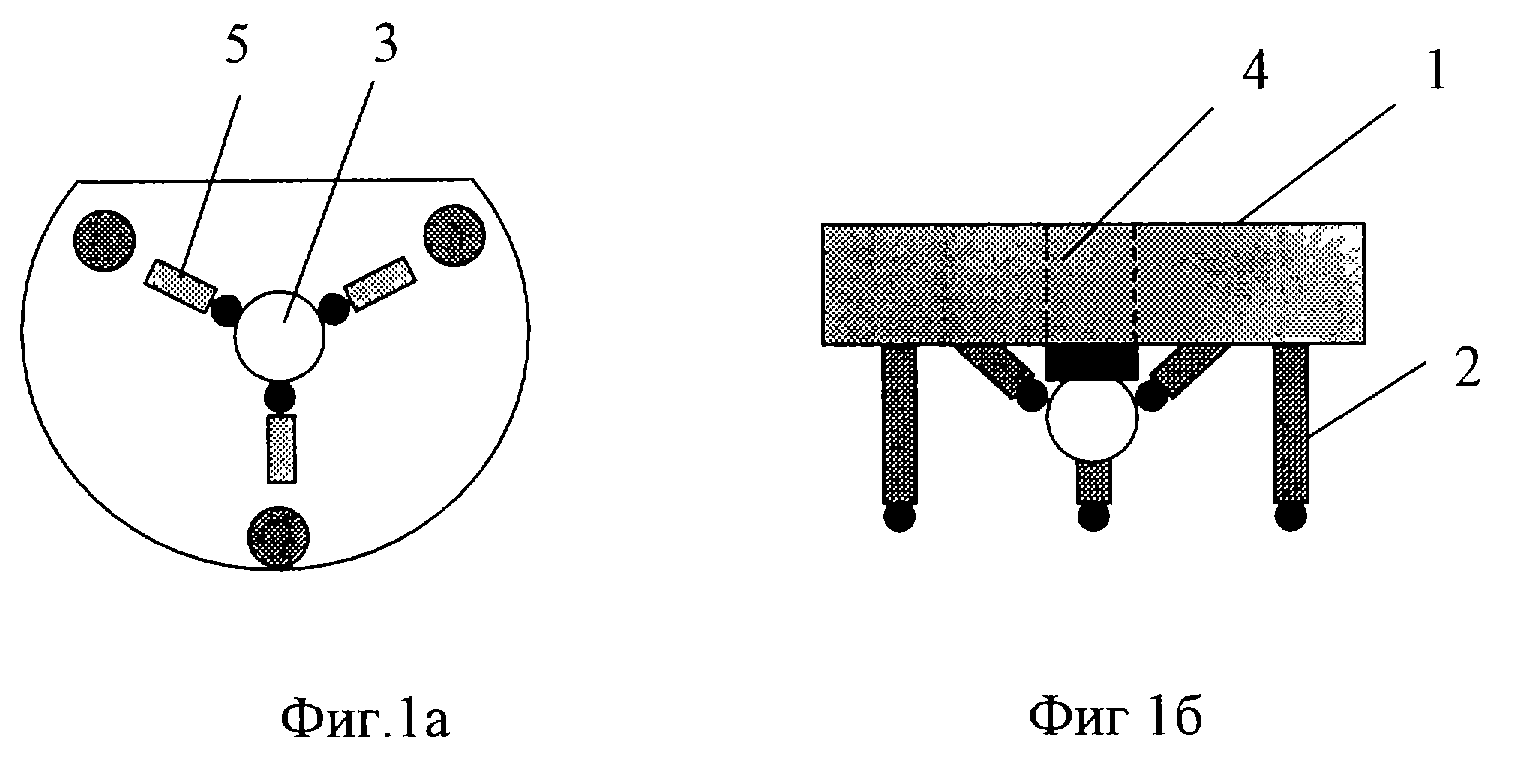
|
 Получить полное описание патента
Получить полное описание патента