|
На данной странице представлена ознакомительная часть выбранного Вами патента
Для получения более подробной информации о патенте (полное описание, формула изобретения и т.д.) Вам необходимо сделать заказ. Нажмите на «Корзину»
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ТЕХНОЛОГИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ |  |
Номер публикации патента: 2163189 |  |
| Редакция МПК: | 7 | | Основные коды МПК: | B25J005/00 B25J019/00 | | Дополн. коды МПК: | B23K037/02 B05B013/04 | | Аналоги изобретения: | An Industrial Walking Machine for Naval Construction. P. GONZALES-DE-SANTOS, M.A.ARMADA, M.A.JIMENEZ. In book "Proceedings of the, 1997 IEEE International Conference on Robotics and Automation". Albuquerque, New Mexico, 1997, p.p.28-33. SU 732134, 05.05.1980. SU 1156907 A, 23.05.1985. SU 719865, 10.03.1980. DE 4300566 AI, 15.07.1993. DE 4013168 AI, 31.10.1990. US 4736826, 12.04.1988. |
| Имя заявителя: | Акинфиев Теодор Самуилович (RU) | | Изобретатели: | Акинфиев Т.С.(RU)
Армада Мануэль (ES)
Гонзалес де Сантос Пабло (ES)
Пановко Г.Я.(RU)
Снежко Н.И.(RU)
Хименес Мария-Антония (ES) | | Патентообладатели: | Акинфиев Теодор Самуилович (RU)
Армада Мануэль (ES)
Гонзалес де Сантос Пабло (ES)
Пановко Григорий Яковлевич (RU)
Снежко Наталья Ивановна (RU)
Хименес Мария-Антония (ES) |
Реферат | |
Изобретение относится к области машиностроения и может быть использовано при автоматическом выполнении технологических операций. На мобильной платформе установлен манипулятор с технологическим оборудованием и смонтирован сенсор положения обрабатываемой детали, выполненный в виде стержня. На концах стержня закреплены первый и второй карданные шарниры. Ближайшие к стержню оси шарниров параллельны одна другой. Второй конец первого шарнира закреплен на подвижной платформе. Второй конец второго шарнира закреплен на рабочем элементе. По меньшей мере одна из осей одного из шарниров оснащена датчиком углового положения. Датчик связан с системой управления. Последняя связана с мобильной платформой, манипулятором и технологическим оборудованием. На рабочем элементе могут быть смонтированы два колеса с параллельными осями, имеющие в поперечном сечении различную форму. В результате обеспечивается расширение функциональных возможностей технологического оборудования, повышение качества выполнения технологических операций, упрощение конструкции устройства и увеличение времени его работы без оператора. 6 з.п.ф-лы, 4 ил.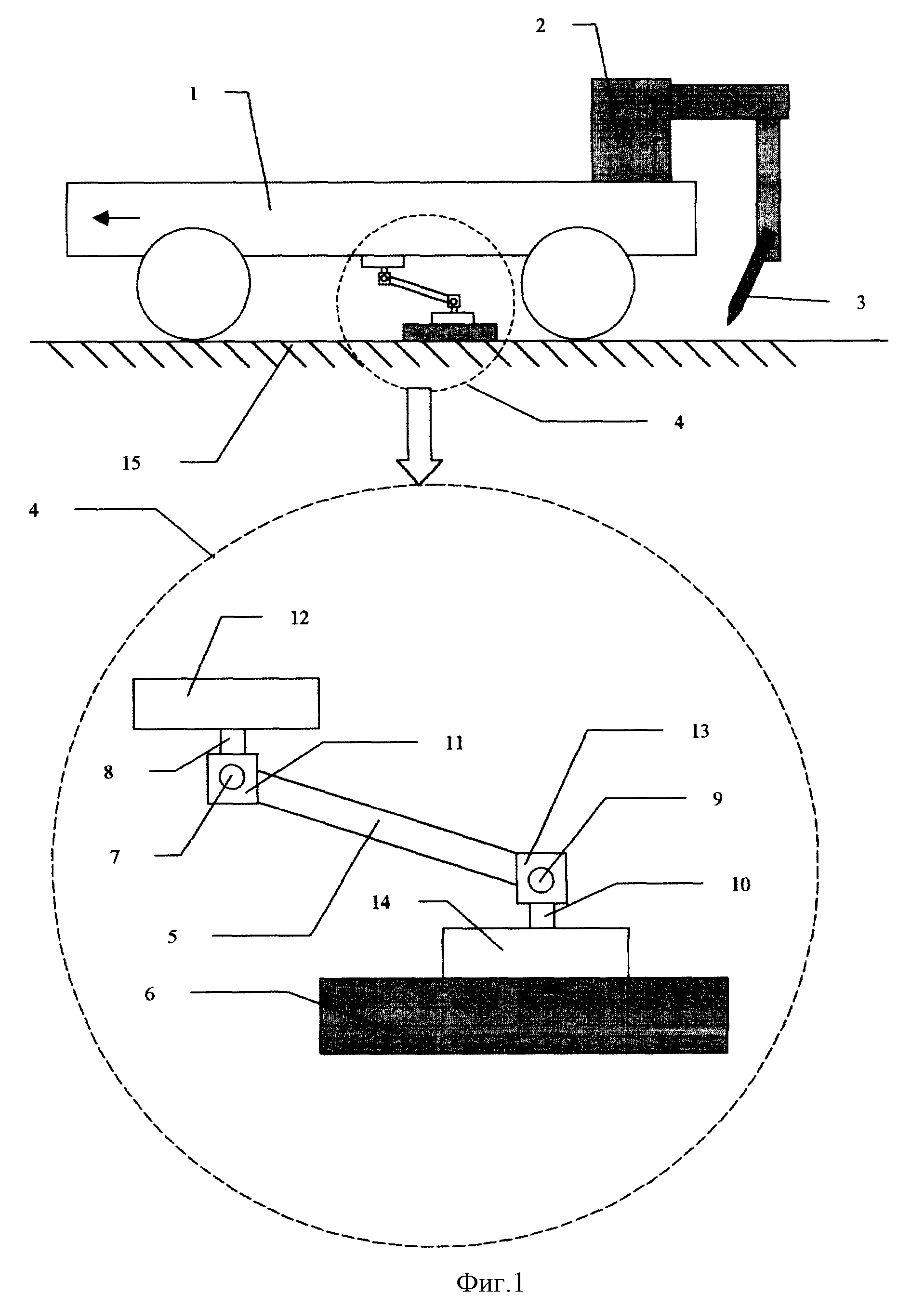
|
 Получить полное описание патента
Получить полное описание патента