|
На данной странице представлена ознакомительная часть выбранного Вами патента
Для получения более подробной информации о патенте (полное описание, формула изобретения и т.д.) Вам необходимо сделать заказ. Нажмите на «Корзину»
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА |  |
Номер публикации патента: 2162792 |  |
| Редакция МПК: | 7 | | Основные коды МПК: | B25J013/08 | | Аналоги изобретения: | RU 2115539 C1, 20.07.1998. RU 2066626 C1, 20.09.1996. EP 0222113 A2, 20.05.1987. FR 2606697 A1, 20.05.1988. |
| Имя заявителя: | Дальневосточный государственный технический университет | | Изобретатели: | Никифоров М.А.
Филаретов В.Ф. | | Патентообладатели: | Дальневосточный государственный технический университет |
Реферат | |
Изобретение относится к робототехнике и позволяет повысить точность и устойчивость привода при больших скоростях изменения нагрузки в процессе работы манипулятора с учетом электрической постоянной времени двигателя. Эти изменения обусловлены существенным взаимовлиянием между степенями подвижности многозвенника при работе на больших скоростях, гравитационными силами и вязким трением. Технический результат - повышение динамической точности управления. Для формирования необходимых корректирующих сигналов предлагается дополнительно ввести четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый, восемнадцатый, девятнадцатый, двадцатый, двадцать первый, двадцать второй, двадцать третий, двадцать четвертый, двадцать пятый, двадцать шестой, двадцать седьмой, двадцать восьмой, двадцать девятый, тридцатый, тридцать первый, тридцать второй, тридцать третий, тридцать четвертый, тридцать пятый блоки умножения, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый, восемнадцатый, девятнадцатый сумматоры, восьмой, девятый, десятый, одиннадцатый, двенадцатый функциональные преобразователи, второй и третий датчики ускорения, второй квадратор и дифференциатор. После коррекции привод становится инвариантным к изменениям параметров нагрузки, а также к моментам сухого и вязкого трения. При этом стабилизируются его динамические свойства и качественные показатели работы. 2 ил.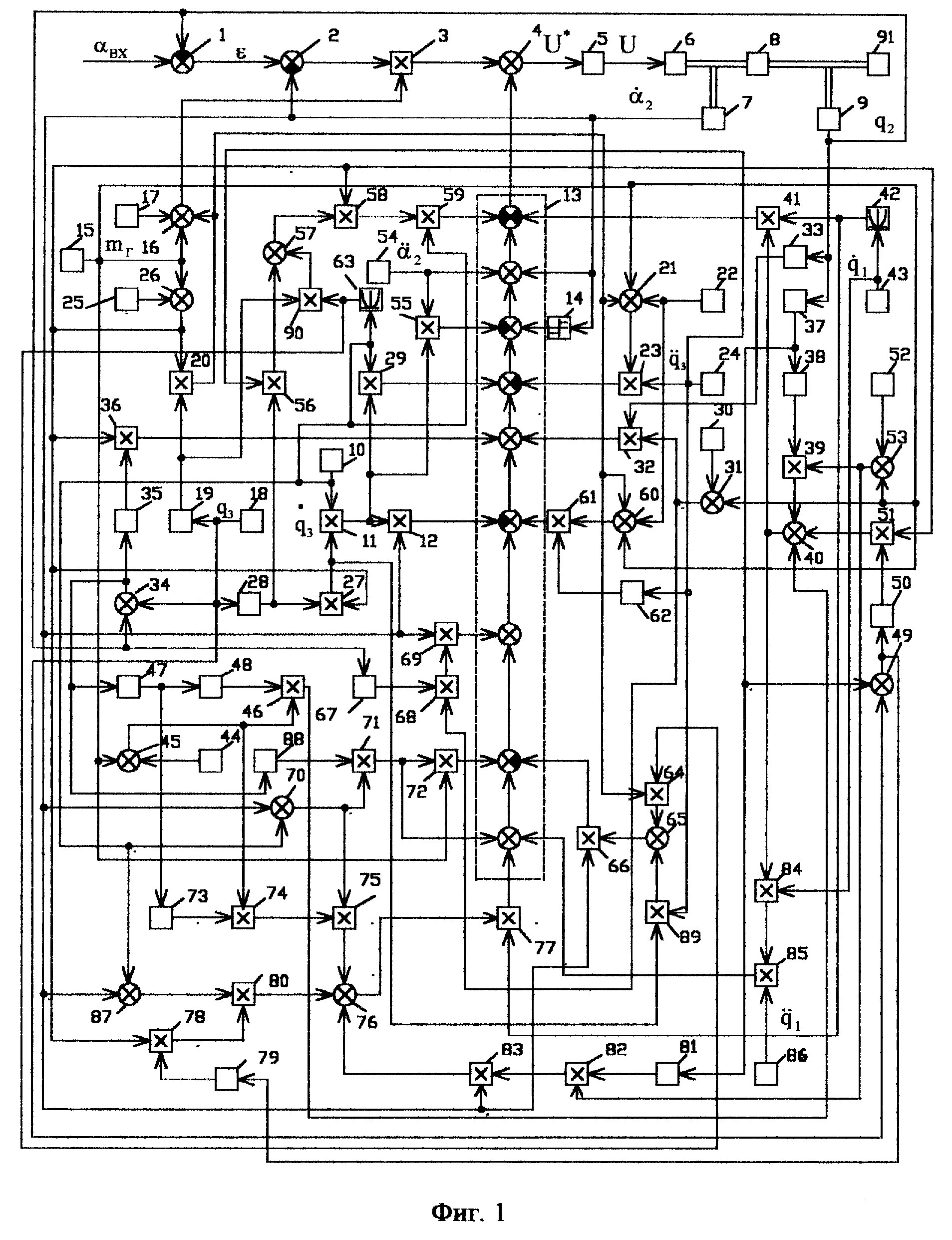
|
 Получить полное описание патента
Получить полное описание патента