|
На данной странице представлена ознакомительная часть выбранного Вами патента
Для получения более подробной информации о патенте (полное описание, формула изобретения и т.д.) Вам необходимо сделать заказ. Нажмите на «Корзину»
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ |  |
Номер публикации патента: 2171999 |  |
| Редакция МПК: | 7 | | Основные коды МПК: | G01S001/14 G01S013/42 | | Аналоги изобретения: | ГИНЗБУРГ В.М. Формирование и обработка изображений в реальном времени. Методы быстрого сканирования. - М.: Радио и связь, 1986, с.34. SU 1809400, 15.04.1993. DE 1773401 B2, 14.10.1976. |
| Имя заявителя: | Жуковский Юрий Георгиевич | | Изобретатели: | Жуковский Ю.Г.
Зайцева К.А.
Кривченко А.И.
Королев В.И. | | Патентообладатели: | Жуковский Юрий Георгиевич |
Реферат | |
Изобретение относится к области локации и навигации, а именно к импульсным методам определения координат и параметров движения объекта локации. Техническим результатом изобретения является повышение точности определения параметров движения объекта, а также расширение функциональных возможностей способа и устройство за счет увеличения быстроты измерений параметров и дополнительного определения радиального ускорения. Способ включает излучение активным контрольным пунктом пачки импульсов с заданным периодом, прием отраженных от объекта локации импульсов пачки, определение расстояния до объекта локации по измеренному времени запаздывания эхо-сигнала при его приеме относительно момента начала излучения пачки и определение радиальной скорости объекта. При приеме отраженных от объекта локации импульсов пачки дополнительно измеряют величину разности времен запаздывания каждых двух соседних импульсов пачки и рассчитывают изменение расстояния до объекта между моментами контактов первой пары соседних импульсов с объектом локации, по этим величинам определяют его радиальную скорость на данном участке движения, затем таким же образом определяют радиальную скорость движения объекта локации между моментами его контакта с последним импульсом первой пары соседних импульсов и первым импульсом последующей пары соседних импульсов, по разности измеренных радиальных скоростей определяют радиальное ускорение движения объекта, после этого проводят оценку допустимых параметров относительного движения активного контрольного пункта и объекта локации и формируют командные сигналы на изменение числа импульсов в излучаемой пачке. Кроме того, при оценке определенных величин расстояния, скорости и ускорения как нежелательных параметров относительного движения активного контрольного пункта и объекта локации дополнительно формируют командные сигналы для изменения длительности и периода излучаемой пачки или формируют командные сигналы для управления движением объекта локации или активного контрольного пункта. Устройство для осуществления способа содержит последовательно соединенные задающий генератор 1 пачек импульсов, передатчик 3 и излучающую антенну 4, последовательно соединенные приемную антенну 5, приемник 6, блок 7 обработки эхо-сигналов с измерителем временных интервалов и вычислительное устройство 8 для расчета дальности до объекта локации и его радиальной скорости, блок управления антеннами 9 с приводом 10, соединенный с одним из выходов блока 7 обработки эхо-сигнала, и генератором 1. Задающий генератор 1 пачек импульсов снабжен блоком 2 изменения скважности пачек, а вычислительное устройство 8 - индикаторами скорости 11 и ускорения 12 и управляющим вычислительным блоком 13 для оценки допустимых параметров относительного движения объекта локации и активного контрольного пункта, соединенный с блоком 2 изменения скважности пачек и блоком 9 управления антеннами. Кроме того, управляющий вычислительный блок 13 для оценки допустимых параметров относительного движения снабжен дополнительными выходами для соединения с блоком 2 изменения скважности пачек и блоком 14 управления относительным движением объекта локации и активного контрольного пункта, расположенного на транспортном средстве. 2 с. и 3 з.п. ф-лы, 3 ил.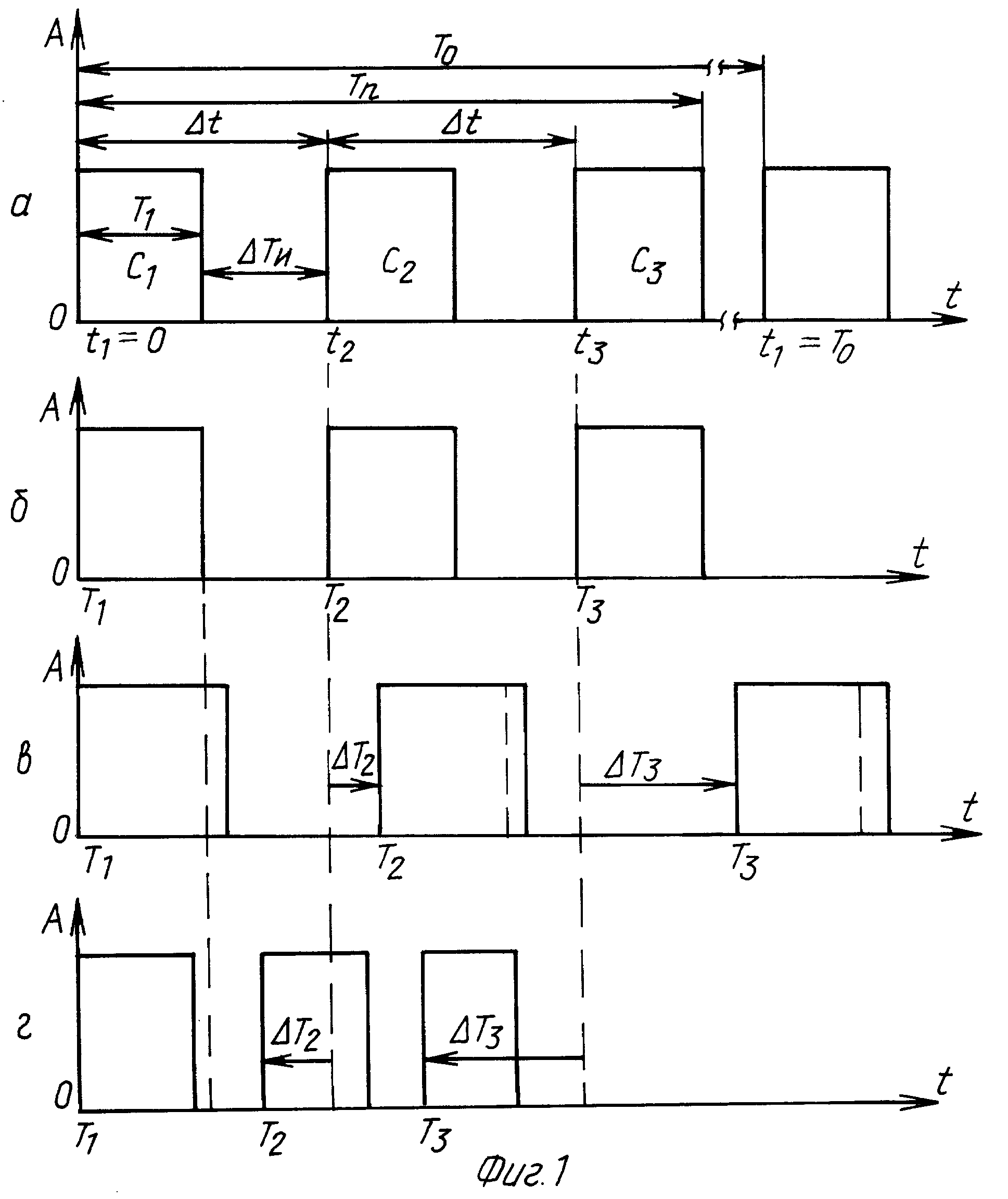
|
 Получить полное описание патента
Получить полное описание патента