|
На данной странице представлена ознакомительная часть выбранного Вами патента
Для получения более подробной информации о патенте (полное описание, формула изобретения и т.д.) Вам необходимо сделать заказ. Нажмите на «Корзину»
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ УПРУГОПОДВЕШЕННОГО ОБЪЕКТА |  |
Номер публикации патента: 2162034 |  |
| Редакция МПК: | 7 | | Основные коды МПК: | B60G023/00 | | Аналоги изобретения: | SU 1787810 A1, 15.01.1993. SU 487794, 21.01.1976. SU 988147, 28.02.1983. WO 89/05243 A1, 15.06.1983. JP 62-194924, 27.08.1987. DE 3638574 A1, 26.05.1988. EP 0217360 A1, 08.04.1987. |
| Имя заявителя: | Ростовский военный институт ракетных войск | | Изобретатели: | Воробьев С.А.
Кулешов А.В. | | Патентообладатели: | Ростовский военный институт ракетных войск |
Реферат | |
Изобретение относится к машиностроению, в частности к управляемым системам амортизации. Способ демпфирования колебаний упругоподвешенного объекта, подвес которого содержит более двух последовательно расположенных и параллельно ориентированных амортизаторов, заключается в том, что измеряют скорость центра масс и угловую скорость объекта, а жесткости амортизаторов Cj изменяют по закону  , ,  , где , где  - деформация j-го упругого элемента; Сjo - начальное значение жесткости j-го упругого элемента; - деформация j-го упругого элемента; Сjo - начальное значение жесткости j-го упругого элемента;  - допустимое значение изменения жесткости j-го упругого элемента; - допустимое значение изменения жесткости j-го упругого элемента;  - скорость поступательного перемещения центра масс объекта; - скорость поступательного перемещения центра масс объекта;  - угловая скорость объекта; qj(t) - величина предварительной деформации j-го упругого элемента (величина кинематического воздействия); xj - координата точки подвеса j-го упругого элемента относительно центра масс; N - число амортизаторов подвеса. Технический результат - обеспечение эффективного гашения поступательно-угловых колебаний объектов со многими степенями свободы и упрощение системы управления жесткостью упругого подвеса. 4 ил. - угловая скорость объекта; qj(t) - величина предварительной деформации j-го упругого элемента (величина кинематического воздействия); xj - координата точки подвеса j-го упругого элемента относительно центра масс; N - число амортизаторов подвеса. Технический результат - обеспечение эффективного гашения поступательно-угловых колебаний объектов со многими степенями свободы и упрощение системы управления жесткостью упругого подвеса. 4 ил.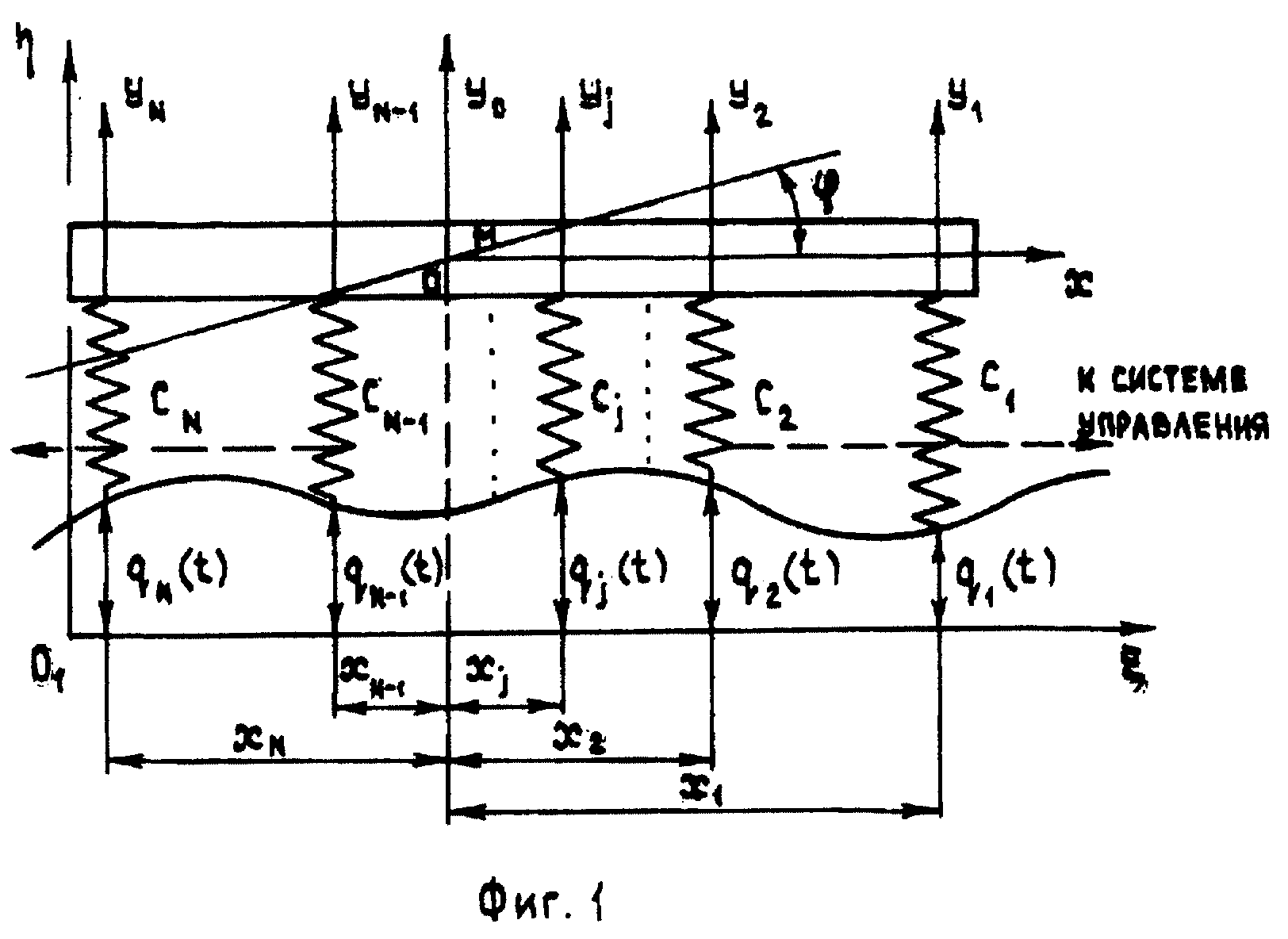
|
 Получить полное описание патента
Получить полное описание патента